Программное обеспечение для гибкой интеграции робота-манипулятора в рабочий процесс и решения задач управления, визуализации и взаимодействия с пользователем
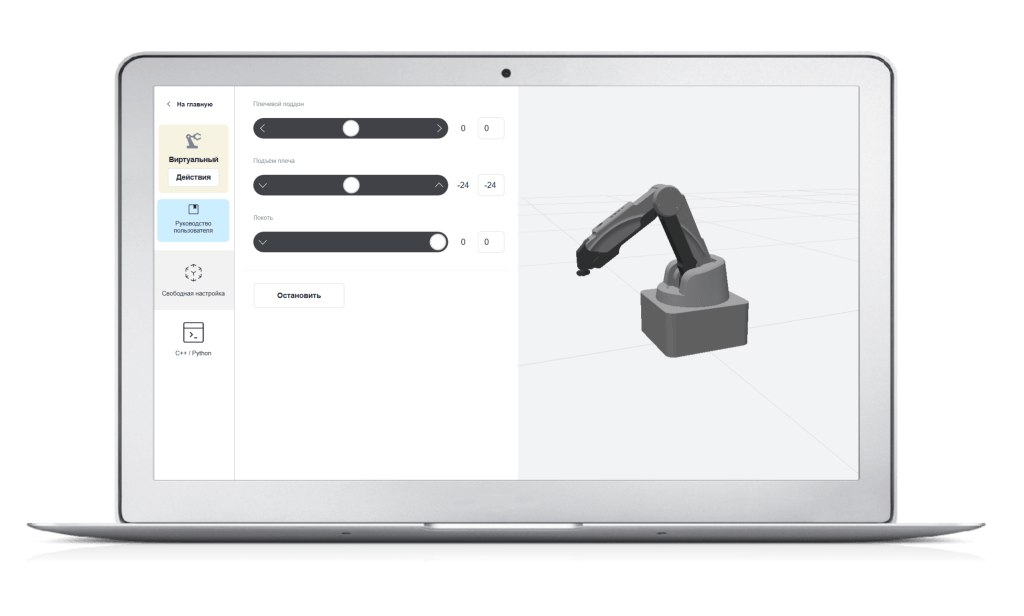
Планирование и выполнение траекторий движения манипулятора в трех режимах: ручное управление в виртуальной среде, управление с помощью пульта или автоматическое управление с помощью заранее созданной программы движения.
Интерактивное управление внешним инструментом
Управление внешним инструментом (например, захватом, гравером, 3D-печатью) в реальном времени через веб-интерфейс.
Визуализация состояния манипулятора
Отображение текущего состояния манипулятора и его компонентов в реальном времени.
Создание и запуск программ автоматизации
Разработка и выполнение программ благодаря встроенному редактору для автоматического выполнения задач.
Поддерживаемые языки программирования: C++, Python.